
Knowing how to read the information on a motor nameplate will allow you to identify performance characteristics and applications of a motor, as well as potentially solve unexpected performance issues.
NEMA requires the following information on a nameplate (although more info may be included)
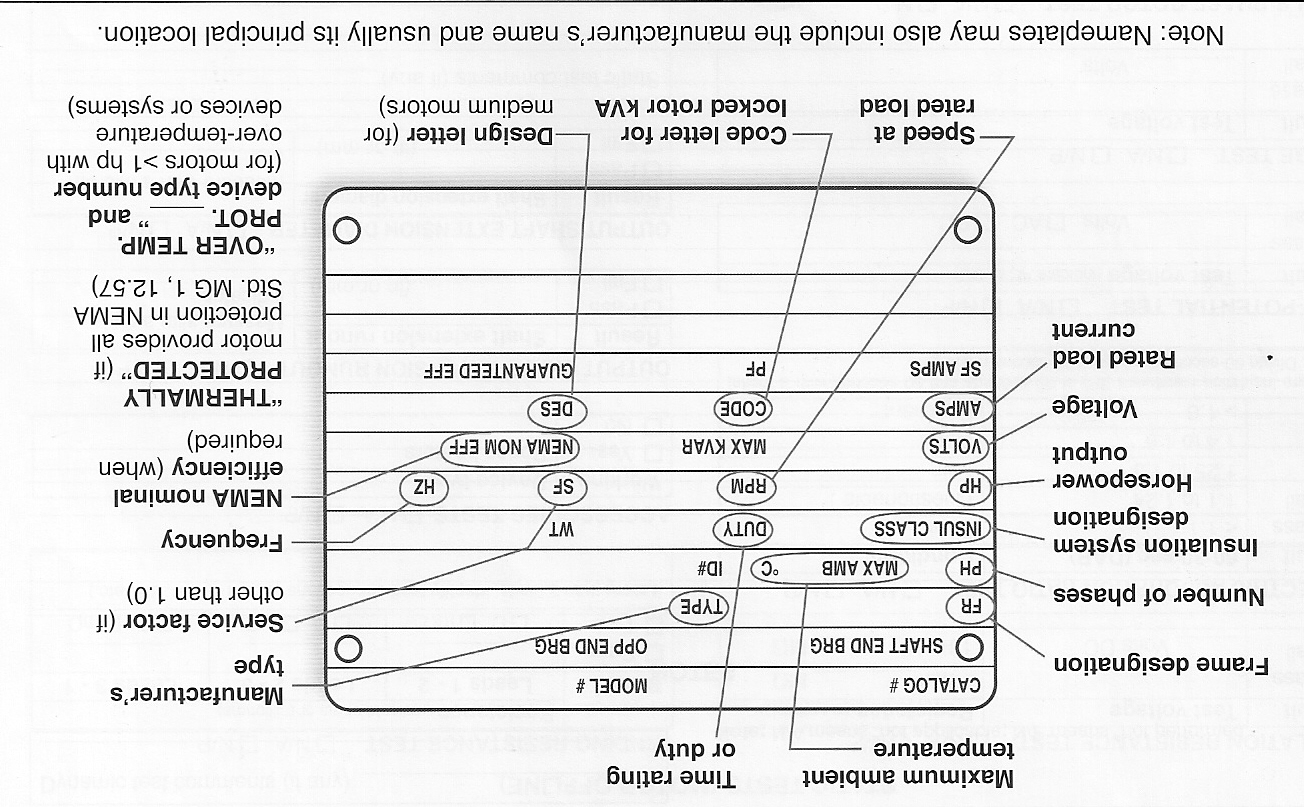
- Frame Designation (FR) – this is typically a two or three digit number followed by one or more letters that identifies important mounting dimensions.
- Manufacturers Type (TYPE). Manufacturers may use the TYPE block to designate a product family or some other qualifier that identifies the motor’s fit or function.
- Horsepower Output (kW). Usually labeled as HP or kW, this is the measure of the motors ability to deliver the torque required for the load at a rated speed. hp = 0.746 x kW; conversely, kW =1.34 x hp.
- Time Rating or duty (DUTY). This designation specifies the length of time that the motor can safely carry its nameplate rating. Usually this is continuous (CONT), which NEMA defines as indefinitely. The duty for motors used intermittently is usually expressed in minutes.
- Max Ambient Temp. This is the maximum allowable temperature of the surrounding air to ensure that the motors operating temperature wont exceed the insulation system limit. The standard ambient temperature is 40 Celsius (104 degrees F).
- NOTE ** – The ambient temperature rating is sometimes confused with temperature rise. The temperature rise isn’t normally given on the nameplate, but the insulation class is. The temperature rise rating is based on a combination of factors such as motor enclosure, insulation class, and service factor.
- Insulation System Designation. (CLASS, INS. CLS., INSUL CLASS). This indicates the motor winding’s thermal endurance using industry standard letter designations sucb as A, B, F, or H. The higher the letter in the alphabet , the higher the safe operating temperature, and the longer the winding will last at any given operating temperature.
- Speed At Rated Load (RPM). This is the speed at which rated horsepower output is delivered to the load (full-load speed). This will be slightly less that synchronous rim – ie., the speed of the stator’s revolving magnetic field. The difference between the two is the slip speed or slip-rpm. *See a comparison of synchronous vs. full-load speed of 60Hz motors below:
-
Synchronous Speed Typical Full-Load RPM 3600 3450 1800 1750 1200 1140 900 850 Reducing slip rpm increases motor efficiency, so more efficient designs usually have higher full-load speeds. This could make energy efficient replacement motors problematic for some applications. Centrifugal pumps and fans for example, typically demand power input that varies as the cube of the rpm, which means a small increase in speed produces a much larger increase in power. Carefully consider this before selecting a more efficient replacement motor for such applications.
-
- Frequency (HZ). The standard frequency is 60 Hz in North America and usually 50 Hz elsewhere. If the nameplate shows more that one frequency, it should display frequency-dependent characteristics for each. The increasing use of variable-frequency drives (VFD’s) calls for a frequency range on the nameplate. If only one frequency appears on the nameplate, consult the manufacturer before applying the motor on a VFD. NEMA allows motor frequency variation of only plus or minus 5% for non-VFD applications.
- Number of phases (PH). Single or three phase.
- Voltage (VOLTS). NEMA defines standard voltage rating for three-phase motors. Some common ratings are 200, 230, 460, and 575 volts.
- NEMA allows motors to operate at plus or minus 10% of the nameplate voltage rating, while pointing out that this may degrade performance or efficiency. For example, if applied voltage is reduced 10%, the motor will develop at least 20% less torque. The line current also may increase 10% or more, as well as the motor’s operating temperature.
- NOTE ** – A motor’s operating temperature at full load may be higher on unbalanced voltage than on balanced voltage. Efficiency and winding life may also decrease, evein if the the motor has been derated.
- Some manufacturers show several different voltages on the nameplate, such as the common 208-230 / 460 rating. Since NEMA’s +/- 10% tolerance for 230 volt rating would extend down to 207 volts (230 x .90 =207), that appears safe. The problem is that the actual voltage from a 208 volt source could dip well below 207 volts.
- In addition, ordering a motor rated 480 volts for use on a 480 volt circuit, while allowable, isn’t recommended. To account for voltage drop in the circuit, the standar motor rating is 460 volts.
- Phase voltage unbalance (different voltage on each phase) is often overlooked, but NEMA calls for reducing the horsepower rating if it exceeds 1%. At the maximum allowable unbalance of 5%, horsepower must be reduced 25%. Don’t confuse voltage unbalance with voltage variation. Because of the additional losses associated with it, voltage unbalance also reduces motor efficiency.
- Code Letter for Locked Rotor kVA (CODE). NEMA defines locked rotor kVA per hp with a series of code letter (A to V). Generally, the farther the code letter is from A, the higher the inrush current per hp. A replacement motor with a higher code letter may require different upstream electrical equipment, such as a larger motor starter.
- NOTE ** – Similar nameplate letter designations also represent other motor characterisitics. Read the nameplate carefully to avoid misinterpreting the code, design, and insulation class.
- Design Letter (DES, NEMA DESIGN, DESIGN). NEMA defines four motor designs (A, B, C, and D) in terms of torque and current characteristics. (see tables below). Most motors are design B because of their comparatively high efficiency and torque characteristics. Design A motors may be more efficient but are used infrequently because their relatively high starting current can cause nuisance tripping of motor protection circuitry. Design A motors may also require larger than standard size starters.
-
NEMA Design A B C D Locked rotor current High Medium Medium Medium Locked rotor torque Medium Medium High Very High Maximum torque High Medium High Veru High NEMA Design Applications A and B Fans, blowers, centrifugal pumps, unloaded compressoros, and loads where starting torque requirements are relatively low. Design C Conveyors, cyrshers, reciprocating pumps and compressors, where starting under load is required. Design D High peak loads that require large speed variation such as punch presses, also hoists, and elevators.
-
- Nominal Efficiency (NOM EFF). Efficiency is defined as output power divided by input power, expressed as a percentage. (output/input) x 100.
- NEMA requires nameplate efficiency to be a nominal value based on the average of a large group of motors of the same design. The actual efficiency of any one motor must be within a tolerance band based on a +/- 20% variation in motor losses. The nominal efficiency is often used to calculate energy consumption. Nominal efficiency mist be included on polyphase induction motor name-plates when required by NEMA.
- Service Factor (SF). The service factor is only required ion a nameplate if it is higher than 1.0. Industry standard service factors include 1.0 for totally enclosed motors and 1.15 for open motors. Totally enclosed fan cooled motors with a 1.15 service factor are also widely available, and values of 1.25, 1.4 and higher exist.
- At nameplate voltage and frequency, the allowable overload for a motor with a nameplate service factor equals the rated load multiplied by that service factor. Such operation, however, will adversly affect efficiency, power factor, and temperature rise.
- Thermally Protected (THERMALLY PROTECTED). The words THERMALLY PROTECTED are required if the motor provides all the protection described in NEMA standards.
- Over Temperature Protections (OVERTEM PROT.__). For motors rated above 1 hp equipped with over temperature devices or systems, a number from NEMA must be inserted in the blank to identify the protection type.
Other Terms That Might Show On An Electric Motor Template:
- Power Factor
- Bearings
- Serial Number